12Sep
Drone Inspections go nuclear with GPS and RADAR
 High-precision GPS receivers mounted on drones able to identify 1mm hairline defects in cooling towers
High-precision GPS receivers mounted on drones able to identify 1mm hairline defects in cooling towers
 High-precision GPS receivers mounted on drones able to identify 1mm hairline defects in cooling towers
High-precision GPS receivers mounted on drones able to identify 1mm hairline defects in cooling towers
 MicroPilot recently announced the completion of work to integrate an OxTS xNAV miniature GNSS/INS system in to their UAV autopilots.
The interface allows MicroPilot systems to use the blended GNSS/IMU output of the INS in their flight control system. This integration provides accurate positioning.
“We were excited to work together with MicroPilot to develop an interface between our systems," said Iain Clarke, Product Manager from OxTS. "As the UAV market continues to grow people are still discovering ways to take advantage of the platform. We hope this development brings new opportunities to customers looking for integrated systems and UAV navigation options.”
MicroPilot recently announced the completion of work to integrate an OxTS xNAV miniature GNSS/INS system in to their UAV autopilots.
The interface allows MicroPilot systems to use the blended GNSS/IMU output of the INS in their flight control system. This integration provides accurate positioning.
“We were excited to work together with MicroPilot to develop an interface between our systems," said Iain Clarke, Product Manager from OxTS. "As the UAV market continues to grow people are still discovering ways to take advantage of the platform. We hope this development brings new opportunities to customers looking for integrated systems and UAV navigation options.”
 uAvionix Corporation, the leading Unmanned Aircraft System (UAS) avionics solution provider, recently announced the introduction of PingStation.
PingStation is an all-weather, networkable ADS-B receiver for low and high altitude aircraft surveillance.
Additionally, it is robust enough to permanently mount outdoors in harsh environmental conditions. It is also small enough for use as a mobile asset for roaming operations.
uAvionix Corporation, the leading Unmanned Aircraft System (UAS) avionics solution provider, recently announced the introduction of PingStation.
PingStation is an all-weather, networkable ADS-B receiver for low and high altitude aircraft surveillance.
Additionally, it is robust enough to permanently mount outdoors in harsh environmental conditions. It is also small enough for use as a mobile asset for roaming operations.
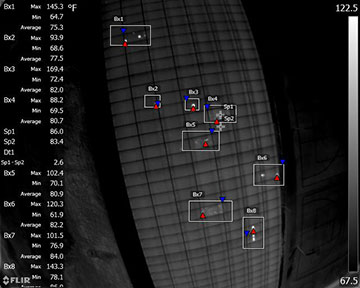
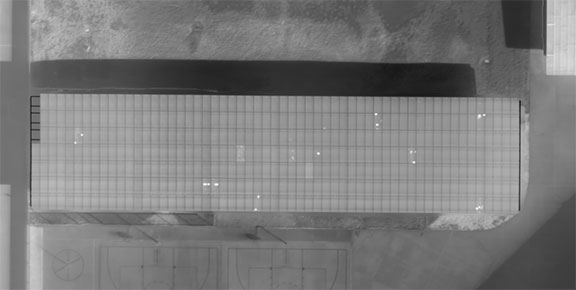
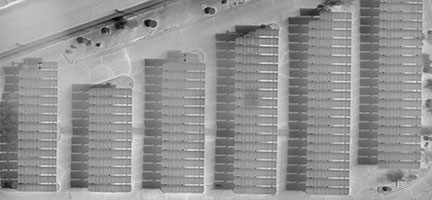
 Solar panel fields, like any other artificial infrastructure objects, require periodical inspections. Usually photovoltaic (PV) solar panel field inspection requires use of two sensors - infrared (IR) and daylight cameras, to detect faulty panels. Solar panels may heat up because of connection issues, physical damage or debris.
A drone equipped with a thermal camera is the best choice for solar panel field inspection. This method saves costs compared to manned aviation and saves time compared to visual control with handheld IR camera.
Semi-professional drones with changeable cameras like DJI Inspire are an option. However, switching out cameras means flight time is doubled. The first is a survey flight conducted with a daylight camera. The flight is then repeated after changing to an IR camera. To minimize time required for inspection usually both sensors (cameras) are used simultaneously. Such a payload requires a drone with enough lift-off capability.
Solar panel fields, like any other artificial infrastructure objects, require periodical inspections. Usually photovoltaic (PV) solar panel field inspection requires use of two sensors - infrared (IR) and daylight cameras, to detect faulty panels. Solar panels may heat up because of connection issues, physical damage or debris.
A drone equipped with a thermal camera is the best choice for solar panel field inspection. This method saves costs compared to manned aviation and saves time compared to visual control with handheld IR camera.
Semi-professional drones with changeable cameras like DJI Inspire are an option. However, switching out cameras means flight time is doubled. The first is a survey flight conducted with a daylight camera. The flight is then repeated after changing to an IR camera. To minimize time required for inspection usually both sensors (cameras) are used simultaneously. Such a payload requires a drone with enough lift-off capability.



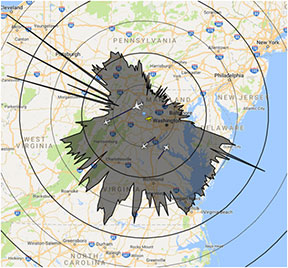
 Recently, Aeromao's Aeromapper Talon successfully completed an autonomous mission to a target located 30km away.
The Talon maintained strong communications and its control link throughout the entire mission.
This mission successfully demonstrated the potential for Beyond Visual Line of Sight (BVLOS) operations for the Talon.
The Aeromapper Talon costs only a fraction compared to systems with similar capabilities.
Recently, Aeromao's Aeromapper Talon successfully completed an autonomous mission to a target located 30km away.
The Talon maintained strong communications and its control link throughout the entire mission.
This mission successfully demonstrated the potential for Beyond Visual Line of Sight (BVLOS) operations for the Talon.
The Aeromapper Talon costs only a fraction compared to systems with similar capabilities.
 UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why:
UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why: