
Delivering high accuracy with GNSS, is it possible? Let’s say you need reliable accurate global positioning in your technology. You do some research and decide a multi-frequency GPS/GNSS[1] receiver is the solution. So, you order an evaluation kit.
Now, how do you get your receiver to deliver the high accuracy that it promises?
GNSS receivers rely on external corrections to compensate for various imperfections called GNSS errors to achieve decimeter or even centimeter level accuracy as fast as possible.
GNSS based positioning is calculated using a method which, by itself, is limited in accuracy. The accuracy limitations are due to several errors caused by GNSS satellites as well as the Earth’s atmosphere.
GNSS satellites are essentially highly accurate synchronized clocks orbiting the Earth. These satellites constantly broadcast their positioning and timing information.
A GNSS user receiver gets signals from several of these “flying clocks” and calculates its distance to each satellite. When the receiver knows the distance to at least four satellites it can deduce its own position.
However, certain errors affect the accuracy of this position.

Even advanced clocks on board GNSS satellites experience minute drifts which cause clock errors.
As GNSS satellites orbit the Earth, their movement along the path is predictable. However, these predictions are not ideal, which results in what’s called orbit errors.
Plus, satellite equipment also introduces small signal errors. They model these errors as satellite biases.
Additionally, there are atmospheric errors. As the signal passes through the Earth’s ionosphere (outer layer) and troposphere (layer near the Earth’s surface), it experiences distortions and delays.
Finally, the local environment around the receiver as well as the receiver itself can introduce errors. For example, satellite signals can reflect off buildings and tall structures, a phenomenon referred to as multipath.
A GNSS receiver cannot correct satellite and atmospheric errors by itself. It relies on data provided by an external source for these corrections.
Clock and orbit errors are satellite dependent, which means that they are the same around the world.
On the other hand, atmospheric errors depend on the path the signal takes as it travels from the satellites to the user. Therefore, they differ depending on the receiver’s location.
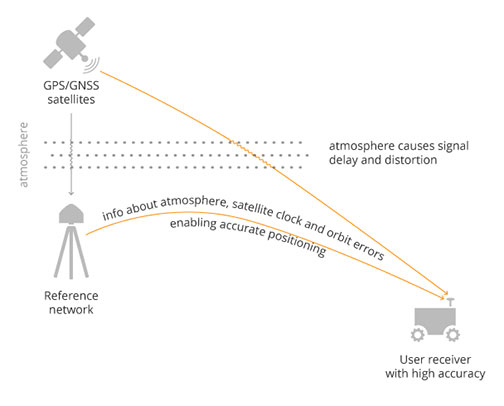
Use of a reference station, also known as a base station, can overcome both satellite and atmospheric errors.
A reference station is a GNSS receiver which installs at a fixed and precisely known location. It estimates GNSS errors and sends them in the form of GNSS corrections to the user receiver (see image below). A reference network consists of interconnected reference receivers spread over an area.
Robust receiver technology and careful operation can partially handle receiver-side errors. Depending on the type of corrections applied, it can take a few seconds to several minutes initialization time until high accuracy is achieved.
Until recently, RTK and PPP were the established methods of providing GNSS corrections to user receivers.
Nowadays, the demand for high accuracy positioning is on the rise, paving the way for new positioning techniques such as the hybrid PPP-RTK.
In the Real Time Kinematic (RTK) method, a user receiver gets correction data from a single base station or from a local reference network. It then uses this data to eliminate most of the GNSS errors.
RTK is based on the principle that the base station and the user receiver are located close together (maximum 40 km or 25 miles apart) and therefore “see” the same errors.
For example, since the ionospheric delays are similar for both the user and the reference station, they can be cancelled out of the solution, allowing higher accuracy.
In the RTK method corrections are provided for a specific location.
In the PPP and PPP-RTK methods, they broadcast a correction model to a larger area but with slightly lower accuracy.
To transmit this correction model, they use a message format called Space State Representation (SSR). There is some confusion in the industry about the term “SSR”. It is occasionally a buzzword referring to traditional PPP services, as well.
The Precise Point Positioning (PPP) corrections contain only the satellite clock and orbit errors.
Since these errors are satellite specific, and thus independent of the user’s location, only a limited number of reference stations around the world are needed.
This method produces lower accuracy levels because it does not include atmospheric errors. Plus, it takes up to 20-30 minutes to initialize; which may not be practical for some applications.
Traditionally, the maritime industry uses PPP. Today, it expanded to various land applications such as agriculture, as a convenient way to get global GNSS corrections.
PPP-RTK (a.k.a. SSR) is the latest generation of GNSS correction services. It combines near-RTK accuracy and quick initialization times with the broadcast nature of PPP.
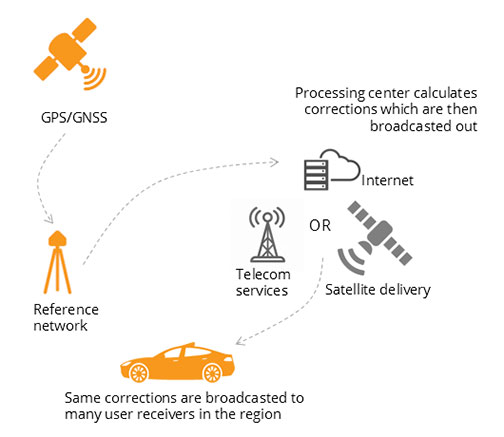
A reference network, with stations about every 150 km (100 miles), collects GNSS data and calculates both satellite and atmospheric correction models.
As explained, atmospheric corrections are regional. Thus, it requires a denser reference network than for PPP. These corrections are broadcast to subscribers in the area via Internet, satellite or telecom services.
Subscribed receivers use the broadcasted correction model to deduce their location-specific corrections, resulting in sub-decimeter accuracy.
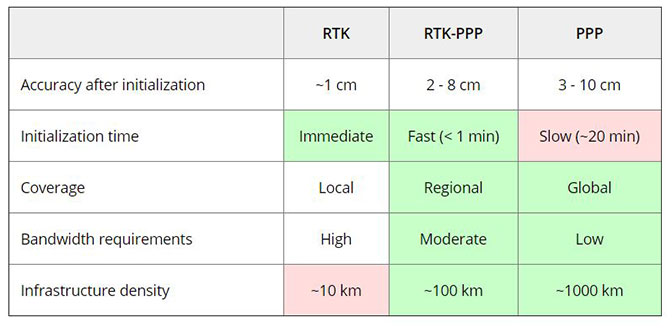
The table below compares the three correction methods, highlighting their strengths and weaknesses.
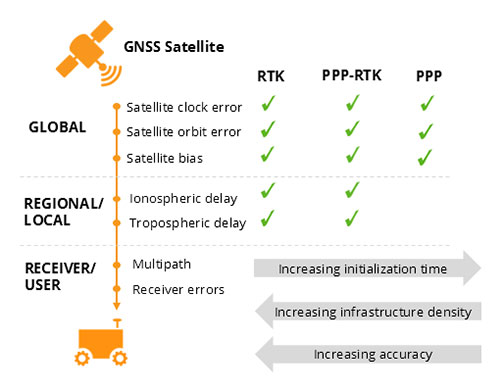
The infrastructure density and initialization time for all three methods vary with the different kinds of errors that are corrected, see image below.
The broadcast nature of PPP-RTK and PPP, as well as the lighter infrastructure that they require, makes these methods scalable for mass market applications.
Some GNSS receivers also incorporate advanced positioning algorithms to compensate for receiver-side issues such as multipath, jamming and spoofing. This adds reliability and robustness to high accuracy positioning.
Modern industrial receivers often get their GNSS corrections via a subscription service. These corrections are delivered via Internet (using NTRIP protocol), satellite or 4G/5G.
Today, driven by the high accuracy demands of the automotive industry, automation and smart devices, there is a boom in the correction service market.
Automotive suppliers and many other new players are deploying infrastructure to set up services for centimeter-level positioning around the globe.
PPP and PPP-RTK corrections can even transmit directly by the GNSS satellites, as in the Japanese CLAS service from the QZSS constellation, or in the planned High-Accuracy Service (HAS) from Galileo.
Depending on the network density and quality of the error modelling, different initialization times and accuracies can be achieved. This means that positioning quality can vary from one service provider to another.
Major telecom companies such as Deutsche Telekom as well as the Japanese Softbank and NTT are equipping their infrastructure with GNSS receivers to enable new corrections services.
3GPP, which provides specifications for mobile telephony including LTE, 4G and 5G, now covers broadcasting of GNSS satellite corrections in their mobile protocol.
Since reference receivers are becoming part of critical infrastructure, such as telecom towers, it is essential that they have a high level of security to protect them from potential jamming or spoofing attacks.
The right correction service for your technology depends on your location and service area, your accuracy and reliability needs, as well as budget.
Because the corrections market keeps expanding, it is now more important than ever that integrators or GNSS manufacturers assist you in selecting the best correction method for your industrial application.
If you choose a GNSS receiver which does not “lock” you to a certain correction service, you are free to choose a correction method which is most suitable for your application and its location. Such “non-locking” open-interface receivers also offer customers flexibility to switch to another more beneficial service in the future, as correction methods keep evolving.
[1] Global Navigation Satellite System including the American GPS, European Galileo, Russian GLONASS, and Chinese BeiDou, Japan’s QZSS and India’s NavIC. These satellite constellations broadcast positioning information to receivers which use it to calculate their location.
 UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why:
These primary reasons carry some further implications for the cost of deployment, especially when considered against PPK.
RTK operations not only require a stationary base station, but it must be located at a known control point. Provided the base station is deployed for long enough periods of time, this is not too much of a problem.
The base station’s precise location can be determined post-mission if no control points are already present. In this case, a global shift of the aircraft’s trajectory must be done once the position of the base station is determined, taking away some of the benefits of a ‘real-time’ solution.
PPK requires a base station as well. But in many cases, at least in the Eastern US, the public CORS network may be dense enough to provide a base station reasonably close to your project. But, it’s likely you will need a base station of your own. This represents slightly less investment in an over-the-air link to the rover. However, it comes with the possibility of loss-of-lock.
In both RTK and PPK, when the rover loses lock, a new integer ambiguity resolution procedure must be initiated.
The advantage of PPK is that the search can proceed from previous and future data relative to that instant. Additionally, forward and reverse solutions in PPK are optimally combined and give an estimate of a solution’s consistency.
RTK solutions cannot use data that has not yet been recorded. If you want to eliminate ground control points and you chose an RTK system, there is no external information for basing accuracy estimates.
Finally, it is worth noting that antennas light enough to be mounted on a small UAS are not geodetic-grade and are not likely calibrated for phase-center variation (PCV), let alone the actual location of the phase center. This means that you might get a reported solution accuracy of 2cm, but it could easily be very misleading.
With a PPK solution, at least you can see if the forward and reverse solutions agree within certain bounds (and we acknowledge this is a very limited vote of confidence for any kinematic solution, but it’s better than nothing).
Ultimately, there is no replacement for real ground truth, especially if your data product must be certified to a specific level of accuracy. However, strategies to minimize the requirements on GCPs can vary widely in their effectiveness, depending on your needs.
If positional accuracies of a few decimeters are acceptable, real-time L-band corrections through a subscription service such as TerraStar-D are very attractive alternatives that require no base stations at all.
You can find and shop Altavian’s line of solutions at Unmanned Systems Source.
