UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why:
- RTK requires a GNSS base station equipped with a transmitter with a reliable link to a fairly dynamic moving platform.
- The rover (on the UAS) itself requires a dedicated receiver for the corrections.
These primary reasons carry some further implications for the cost of deployment, especially when considered against PPK.
PPK vs.RTK
RTK operations not only require a stationary base station, but it must be located at a known control point. Provided the base station is deployed for long enough periods of time, this is not too much of a problem.
The base station’s precise location can be determined post-mission if no control points are already present. In this case, a global shift of the aircraft’s trajectory must be done once the position of the base station is determined, taking away some of the benefits of a ‘real-time’ solution.
PPK requires a base station as well. But in many cases, at least in the Eastern US, the public CORS network may be dense enough to provide a base station reasonably close to your project. But, it’s likely you will need a base station of your own. This represents slightly less investment in an over-the-air link to the rover. However, it comes with the possibility of loss-of-lock.
Losing Lock
In both RTK and PPK, when the rover loses lock, a new integer ambiguity resolution procedure must be initiated.
The advantage of PPK is that the search can proceed from previous and future data relative to that instant. Additionally, forward and reverse solutions in PPK are optimally combined and give an estimate of a solution’s consistency.
RTK solutions cannot use data that has not yet been recorded. If you want to eliminate ground control points and you chose an RTK system, there is no external information for basing accuracy estimates.
Finally, it is worth noting that antennas light enough to be mounted on a small UAS are not geodetic-grade and are not likely calibrated for phase-center variation (PCV), let alone the actual location of the phase center. This means that you might get a reported solution accuracy of 2cm, but it could easily be very misleading.
With a PPK solution, at least you can see if the forward and reverse solutions agree within certain bounds (and we acknowledge this is a very limited vote of confidence for any kinematic solution, but it’s better than nothing).
Conclusion
Ultimately, there is no replacement for real ground truth, especially if your data product must be certified to a specific level of accuracy. However, strategies to minimize the requirements on GCPs can vary widely in their effectiveness, depending on your needs.
If positional accuracies of a few decimeters are acceptable, real-time L-band corrections through a subscription service such as TerraStar-D are very attractive alternatives that require no base stations at all.
You can find and
shop Altavian's line of solutions at Unmanned Systems Source.

 Inertial Labs, Inc., a developer and supplier of high performance Inertial Sensors and Systems, released an affordable, multi GNSS constellation, 1 cm RTK accuracy dual-antenna GPS-Aided Inertial Navigation System (INS).
Inertial Labs, Inc., a developer and supplier of high performance Inertial Sensors and Systems, released an affordable, multi GNSS constellation, 1 cm RTK accuracy dual-antenna GPS-Aided Inertial Navigation System (INS).
 Hemisphere GNSS recently announced the
Hemisphere GNSS recently announced the  Your challenge, should you choose to accept it…
You’ve been asked to survey some points on the ground with centimeter-level accuracy. Feeling confident?
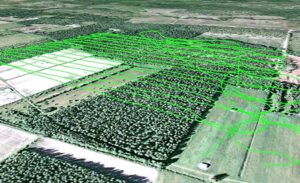
How about a few hundred points spread over 7.5 hectares (18.53 acres) and the job has to be done in one afternoon. Throw in the fact that the area you have to survey is in a quarry which has been closed off due to a recent landslide. Still feeling confident?
You should and here’s why.
Improvements in Unmanned Aerial Vehicle (UAV) technology combined with more compact high-end Global Navigation Satellite Systems (GNSS) receivers means that you no longer have to compromise on precision to measure in those hard-to-reach areas.
Your challenge, should you choose to accept it…
You’ve been asked to survey some points on the ground with centimeter-level accuracy. Feeling confident?
How about a few hundred points spread over 7.5 hectares (18.53 acres) and the job has to be done in one afternoon. Throw in the fact that the area you have to survey is in a quarry which has been closed off due to a recent landslide. Still feeling confident?
You should and here’s why.
Improvements in Unmanned Aerial Vehicle (UAV) technology combined with more compact high-end Global Navigation Satellite Systems (GNSS) receivers means that you no longer have to compromise on precision to measure in those hard-to-reach areas.
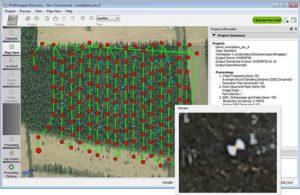
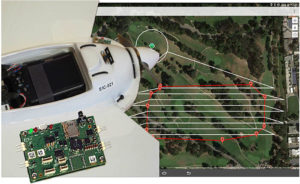 UAVs have become more reliable and easier to work with: from programming flight paths to installing additional equipment on board, UAV applications are no longer confined to a limited group of specialists.
For a survey flight, your UAV will need to have installed: a high-resolution camera and a high-end GNSS receiver module. To fly the UAV through a pre-programmed flight plan, an autopilot flight controller is often included.
UAVs have become more reliable and easier to work with: from programming flight paths to installing additional equipment on board, UAV applications are no longer confined to a limited group of specialists.
For a survey flight, your UAV will need to have installed: a high-resolution camera and a high-end GNSS receiver module. To fly the UAV through a pre-programmed flight plan, an autopilot flight controller is often included.